EtherCAT interface, Bipolar constant current, Four axes 2-phasestepping motor driver
 [Features]
[Features]
・Ethernet Fieldbus "EtherCAT" Interface
・Supports the drive profile CiA402, PP mode (Profile Position Mode) and HM mode (Homing mode)
DC synchronization: 250 μs or higher
・PCL6046 LSI (by Mabuchi Motor NPM) is integrated as the core for motion controls
・2-phase bipolar constant-current stepping motor driver
Max. output current 3.0 A / phase, 1/32 micro-step drive
・Advanced current control function
Current-up during acceleration/deceleration (up to 1.5 times of the set current (max. 3.0 A))
AGC(Active Gain Control) function
・Mechanical position counting in accordance with encoder inputs
・Various settings by the software (reliability is improved by eliminating DIP switches)
・Compact size: 170(W) × 120(D) × 30(H) mm
・Excellent cost performance
Specification
EtherCAT
| Device ID | 1 |
|---|---|
| Communication protocol | EtherCAT PDO (Process Data Object) SDO (Service Data Object) |
| Supporting communication protocol | CoE (CANopen application protocol over EtherCAT) FoE (File Access over EtherCAT) |
| Control profile | CiA402 drive profile |
| Operation mode | PP (Profile Position) mode HM (Homing Mode) |
| Synchronous mode | DC (Distributed Clock) mode: 250 μs or higher / Free Run mode |
Motion control
| Number of controllable axes | Four axes |
|---|---|
| Core for motion controls | Pulse control LSI PCL6046 by NPM (Reference clock: 24.576 MHz) |
Driver
| Applicable motor | 2-phase bipolar stepping motor |
|---|---|
| Control method | Bipolar constant current drive |
| Excitation method | Micro-stepping control (1/1, 1/2, 1/4, 1/8, 1/16 and 1/32) |
| Output current | 0.1 A to 3.0 A per phase (in increment of 0.1 A) |
| Motor drive current control | AGC (Active Gain Control) Control* Current-up at acceleration/deceleration (up to 1.5 times the set current (max. 3.0 A)) |
| Error detection | Overcurrent, overheat and motor power-down |
| Drive parameter | Set by SDO (Service Data Object) communication |
Signal
| Input signal | Emergency stop/ Each axis: ± End Limit/ Home / Encoder A, B, Z phases |
|---|---|
| Output signal | Alarm/ Comparator per axis |
Other
| Supply voltage | +12 V to +24 V DC ±10 % (separate inputs for motor drive power and control power) |
|---|---|
| Supply current | Control power: 0.5 A/ Motor drive power: 6 A per 2 axes |
| Applicable standards | RoHS Directive 2011/65/EU (including additional four substances in 2015/863/EU) |
| Operating temperature range | 0 to 45 °C (no condensation) |
| Storage temperature range | -10 to 60 °C (no condensation) |
| Firmware | FoE (File Access over EtherCAT) It can be rewritten using protocol. |
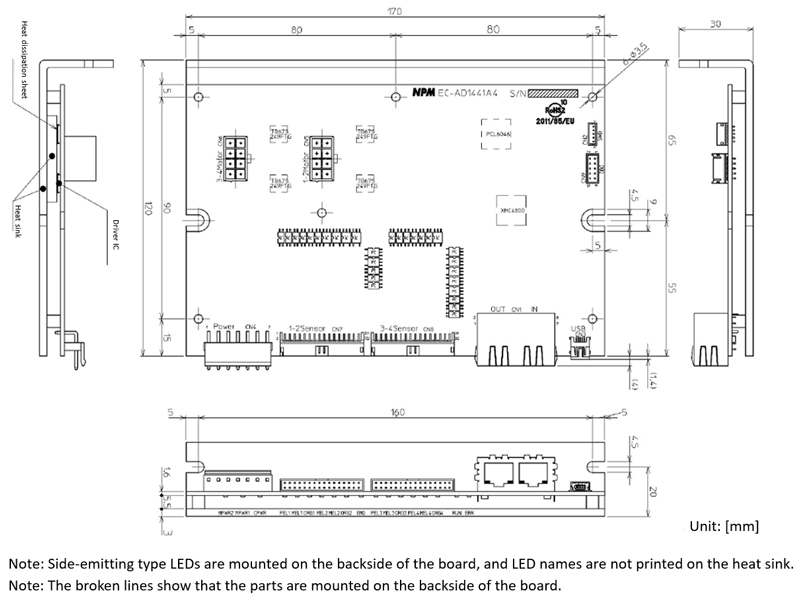
| External dimensions | 170 mm (W) × 120 mm (D) × 30 mm (H) |
| Cooling system | Natural cooling (forced cooling is required if heat sink exceeds 70 °C) |
Dimensions
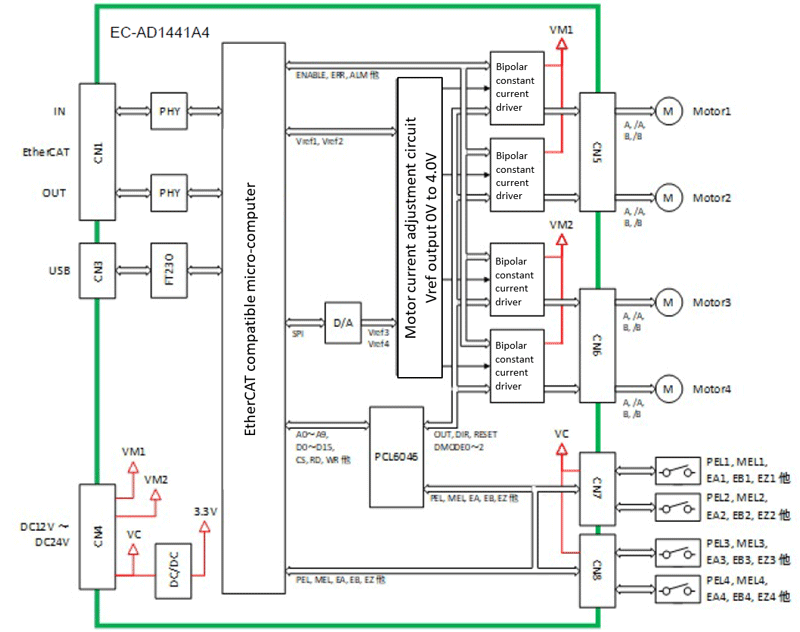
Block configuration
Optional items
| Item Name | Item No. | Model No. | Appearance |
|---|---|---|---|
| Harness for power supply | 2240-001106 | ECD-U4CA-PW1 |  |
| Harness for motor connection | 2240-001110 | ECD-B4CA-MT1 |  |
| Harness for I/O signal connection | 2240-001108 | ECD-U4CA-IO1 |  |