EtherCAT interface 2-phase bipolar constant current, 1-axis stepping motor driver
 [Features]
[Features]
・Ethernet fieldbus "EtherCAT" interface
・Supports the drive profile CiA402, PP mode. DC Synchronization: 250 us or higher
・NPM’s Pulse Control LSI: PCL6115, is integrated as the core for motion controls
・Current-up at acceleration/deceleration up to 3.0 A / phase (max), 1/32 micro-stepping drive,
・Open-loop
・Mechanical position count in accordance with encoder inputs
・Excellent cost performance
・Compact size
Specification
EtherCAT
| Device ID | 1 |
|---|---|
| Communication protocol | EtherCAT PDO (Process Data Object) SDO (Service Data Object) |
| Supporting communication protocol | CoE (CANopen application protocol over EtherCAT) FoE (File Access over EtherCAT) |
| Control profile | CiA402 drive profile |
| Operation mode | PP (Profile Position) mode HM (Homing Mode) |
| Synchronous mode | DC (Distributed Clock) mode: 250 μs or higher / Free Run mode |
Motion control
| Number of controllable axes | 1 axes |
|---|---|
| Motion control core | NPM’s Pulse Control LSI, PCL6115 (Reference clock: 24.576 MHz) |
Driver
| Applicable motor | 2-phase bipolar stepping motor |
|---|---|
| Control method | Bipolar constant current drive |
| Excitation method | Micro-stepping control (1/1, 1/2, 1/4, 1/8, 1/16 and 1/32) |
| Output current | 0.1 A to 2.5 A/ phase (in increments of 0.1 A) |
| Motor drive current control | AGC (Active Gain Control) Control*/ Intelligent current control |
| Error detection | Overcurrent, overheat and motor power-down |
| Drive parameter | Set by SDO (Service Data Object) communication |
I/O signal
| Input signal | Emergency stop / ± End limits for each axis / Origin / Encoder A, B, Z phases |
|---|---|
| Output signal | Comparator (= Comparator 1 in PCL6115) |
Other
| Supply voltage | +12 to +24 V DC ±10 % (Separated for control power and motor driver power) |
|---|---|
| Supply current | Control power supply: 0.5 A / Motor drive power supply: 6A |
| Applicable standards | RoHS directive 2011/65/EU (including 4 additional substances in 2015/863/EU) |
| Operating temperature range | 0 to 45 °C (no condensation) |
| Storage temperature range | -10 to 60 °C (no condensation) |
| Firmware | FoE (File Access over EtherCAT) It can be rewritten using protocol. |
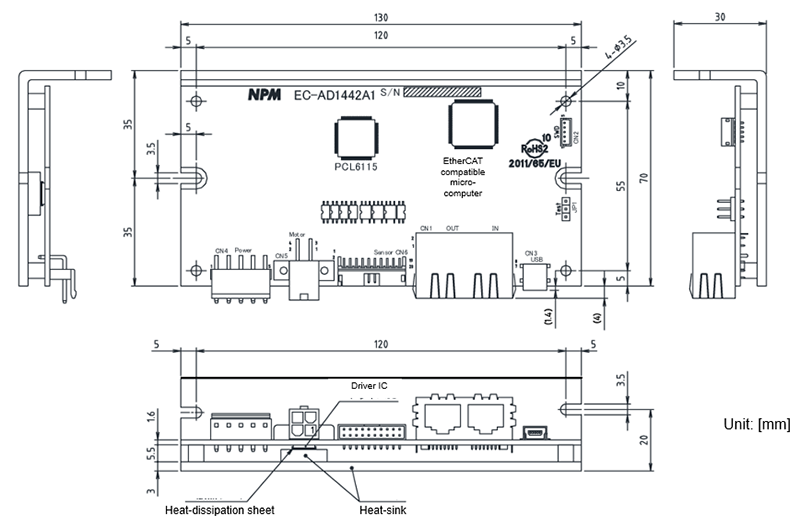
| External dimensions | 130 mm (W) × 70 mm (D) × 30 mm (H) |
| Cooling system | Natural cooling (Forced cooling is required if the heat sink temperature exceeds 70 °C) |
Dimensions
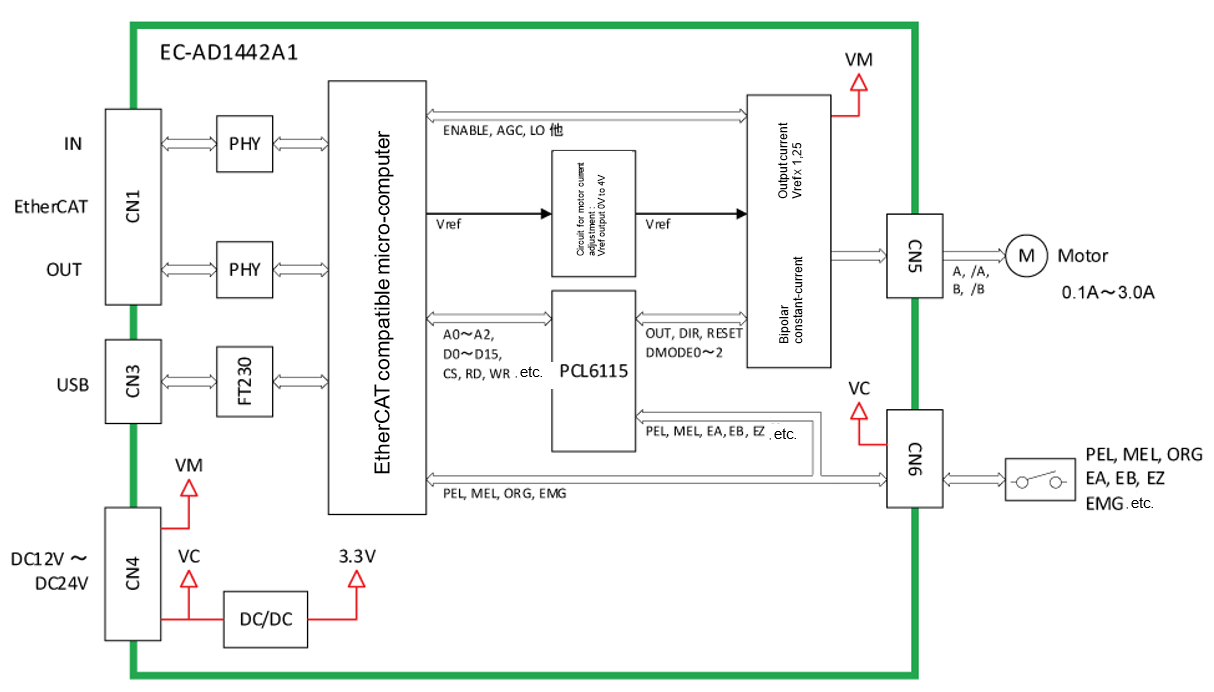
Block configuration
Optional items
| Item Name | Item No. | Model No. | Appearance |
|---|---|---|---|
| Connector set | 2240-001101 | ECD-B1CN |  |
| Harness for power supply | 2240-001102 | ECD-B1CA-PW1 |  |
| Harness for motor connection | 2240-001103 | ECD-B1CA-MT1 |  |
| Harness for I/O signal connection | 2240-001104 | ECD-B1CA-IO1 |  |