 Body diameter: 40mm
Body diameter: 40mm
Body length: 32 / 38 / 44mm
Max torque: 0.33 / 0.70 / 1.0 N・m
Max speed: 450rpm
Max resolution: 324,000P/R, 20bit
Hollow diameter: 6.12mm (MDH type)
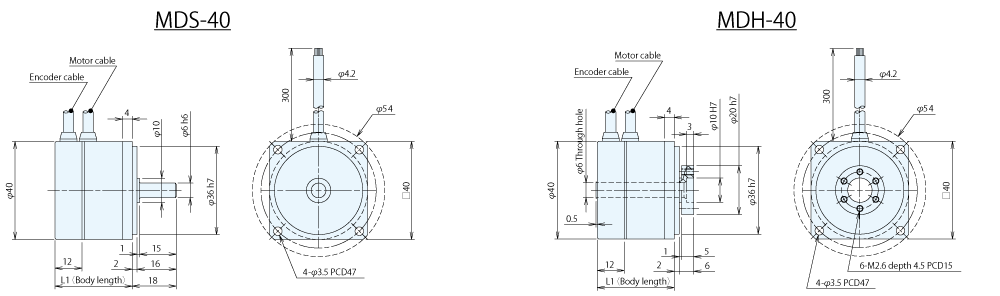
MDS-40 series
| MDS-4006 | MDS-4012 | MDS-4018 | ||
| Body Diameter | mm | 40 | ||
| Body Length | mm | 31.5 | 37.5 | 43.5 |
| Peak Torque | mN⋅m | 0.33 | 0.70 | 1.0 |
| Rated Torque | mN⋅m | 0.12 | 0.20 | 0.28 |
| Continuous Rated Torque | mN⋅m | 0.10 | 0.16 | 0.23 |
| Max Speed | rpm | 450 | ||
| Rated Speed | rpm | 450 | ||
| Max Encoder Resolution | P/R | Incremental: 324,000 / Absolute: 1,048,576(20bit) | ||
| Input Power (driver input) | DCV | 48 | ||
| Peak Power | W | 14 | 27 | 40 |
| Peak Current | Arms | 6.3 | 7.5 | 10 |
| Rated Current* | Arms | 1.6 | 1.7 | 2.3 |
| Rotor Poles | P | 16 | ||
| Moment of Inertia(J) | kg⋅m2 | 2.33×10-6 | 2.88×10-6 | 4.98×10-6 |
| Permissible Radial Load(Fr) | N | 140 | ||
| Permissible Axial Load(Fa) | N | 70 | ||
* Rated current is the value measured with the standard heatsink attached to the motor at an ambient temperature of 40°C.
MDH-40 series
| MDH-4006 | MDH-4012 | MDH-4018 | ||
| Body Diameter | mm | 40 | ||
| Body Length | mm | 31.5 | 37.5 | 43.5 |
| Peak Torque | mN⋅m | 0.33 | 0.70 | 1.0 |
| Rated Torque | mN⋅m | 0.12 | 0.20 | 0.28 |
| Continuous Rated Torque | mN⋅m | 0.10 | 0.16 | 0.23 |
| Max Speed | rpm | 450 | ||
| Rated Speed | rpm | 450 | ||
| Max Encoder Resolution | P/R | Incremental: 324,000 / Absolute: 1,048,576(20bit) | ||
| Input Power (driver input) | DCV | 48 | ||
| Peak Power | W | 14 | 27 | 40 |
| Peak Current | Arms | 6.3 | 7.5 | 10 |
| Rated Current* | Arms | 1.6 | 1.7 | 2.3 |
| Rotor Poles | P | 16 | ||
| Moment of Inertia(J) | kg⋅m2 | 2.88×10-6 | 4.45×10-6 | 6.03×10-6 |
| Permissible Radial Load(Fr) | N | 140 | ||
| Permissible Axial Load(Fa) | N | 70 | ||
* Rated current is the value measured with the standard heatsink attached to the motor at an ambient temperature of 40°C.
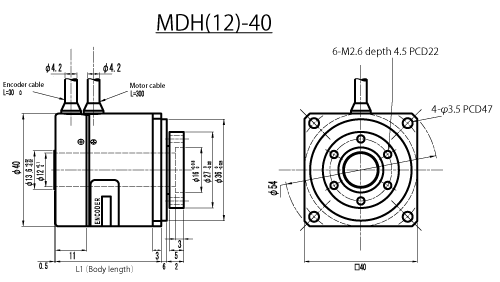
MDH(12)-40 series
| MDH(12)-4006 | MDH(12)-4012 | MDH(12)-4018 | ||
| Body Diameter | mm | 40 | ||
| Body Length | mm | 31.5 | 37.5 | 43.5 |
| Peak Torque | mN⋅m | 0.33 | 0.70 | 1.0 |
| Rated Torque | mN⋅m | 0.12 | 0.20 | 0.28 |
| Continuous Rated Torque | mN⋅m | 0.10 | 0.16 | 0.23 |
| Max Speed | rpm | 450 | ||
| Rated Speed | rpm | 450 | ||
| Max Encoder Resolution | P/R | Incremental: 324,000 / Absolute: 1,048,576(20bit) | ||
| Input Power (driver input) | DCV | 48 | ||
| Peak Power | W | 14 | 27 | 40 |
| Peak Current | Arms | 6.3 | 7.5 | 10 |
| Rated Current* | Arms | 1.6 | 1.7 | 2.3 |
| Rotor Poles | P | 16 | ||
| Moment of Inertia(J) | kg⋅m2 | 4.98×10-6 | 6.46×10-6 | 7.94×10-6 |
| Permissible Radial Load(Fr) | N | 140 | ||
| Permissible Axial Load(Fa) | N | 70 | ||
* Rated current is the value measured with the standard heatsink attached to the motor at an ambient temperature of 40°C.
Dimension Guide