
概要
当社製PCアプリケーション”Detail Motion”によるモーション制御を紹介します。
Detail Motion
Detail Motionは、パルスコントロールLSIに関する知識がなくても、簡単にモーション制御できる専用アプリケーションです。
プログラミング言語にC#もしくはArduinoを選択し、サンプルファイルを出力可能です。
現在、以下の製品が対応しています。
※その他の製品についても順次実装を予定しています。
プログラミング言語にC#もしくはArduinoを選択し、サンプルファイルを出力可能です。
現在、以下の製品が対応しています。
※その他の製品についても順次実装を予定しています。
| 名称 | 制御対象例 | アクセス方式 |
|---|---|---|
| PCL6115 | PCL6115-EV | SPIバス |
| PCL6125 | PCL6125-EB | SPIバス |
| PCL6240 | PCL6240-EV | SPIバス |
ダウンロード
使用事例
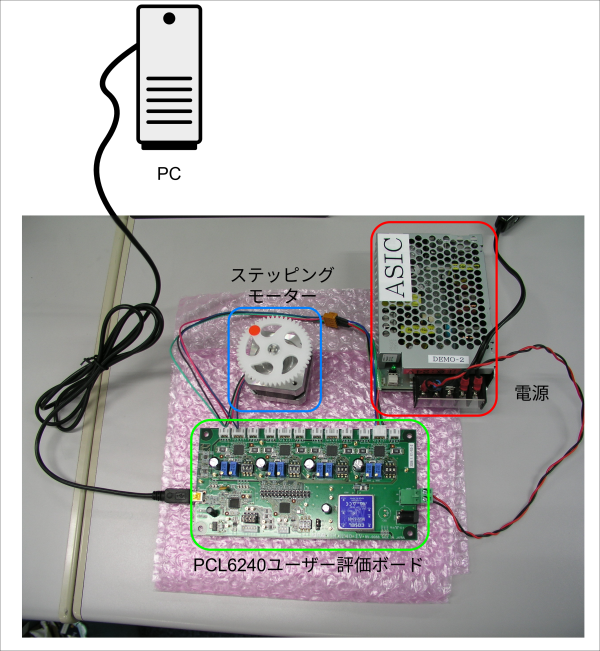
PCL6240-EV (PCL6240ユーザー評価ボード)を使用してモーション制御する事例について説明します。
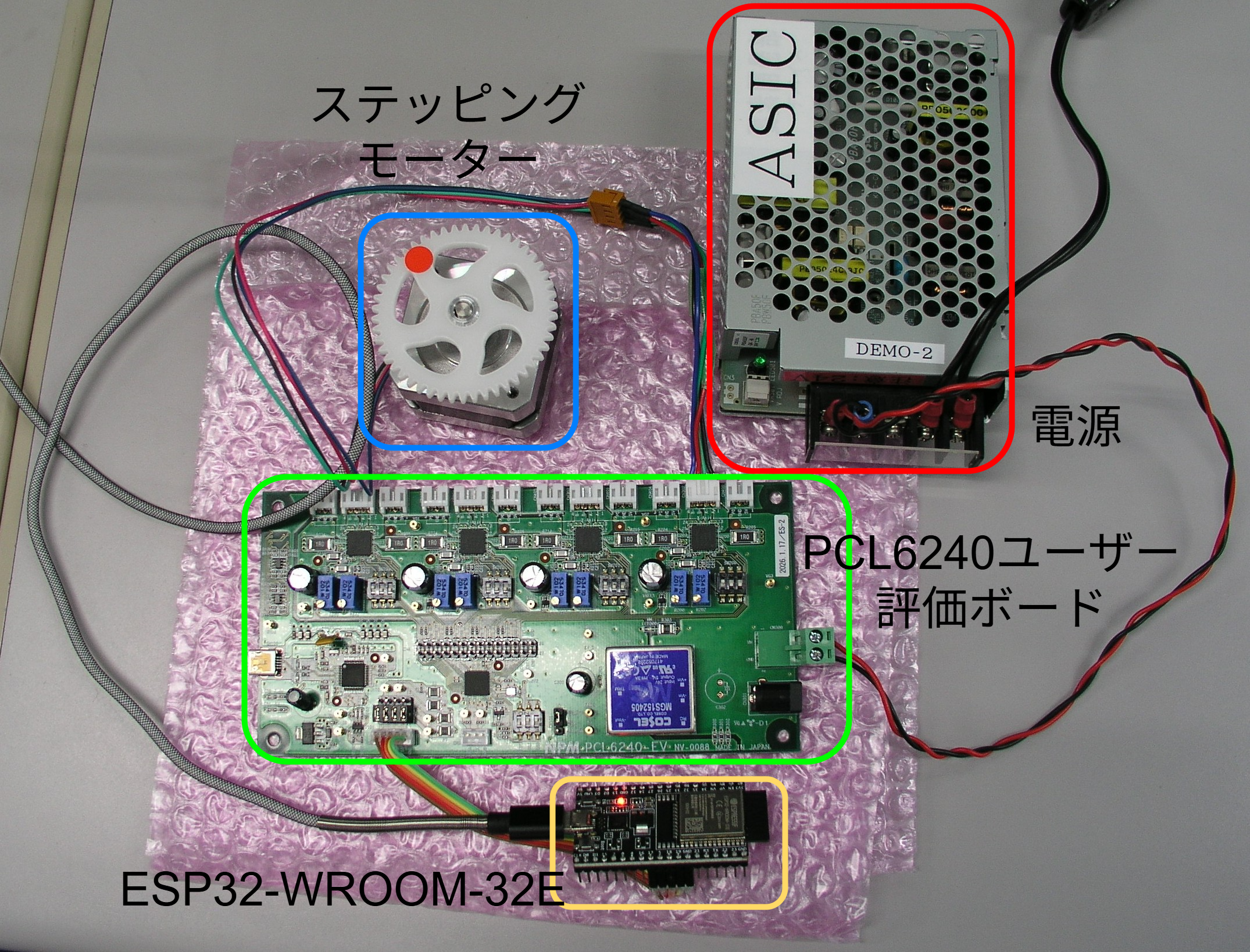
接続方法
PCL6240-EV(PCL6240ユーザー評価ボード)とステッピングモーター、PCをこのように接続します。
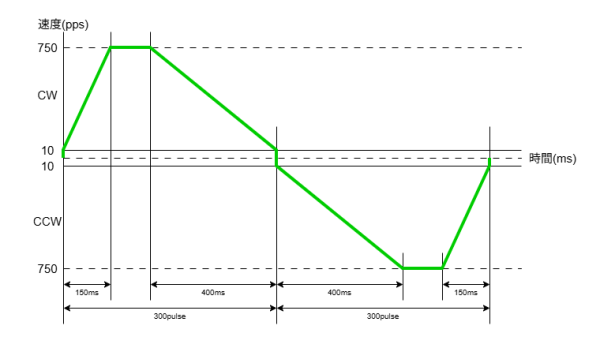
動作パターン作成と手順(1~4)
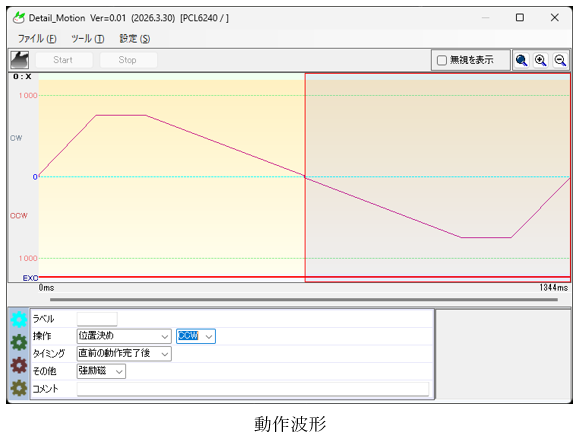
Detail Motionでこのような動作パターンを作成して、モーション制御します。
1. Detail Motionを起動し、LSI(PCL6240)を選択します。
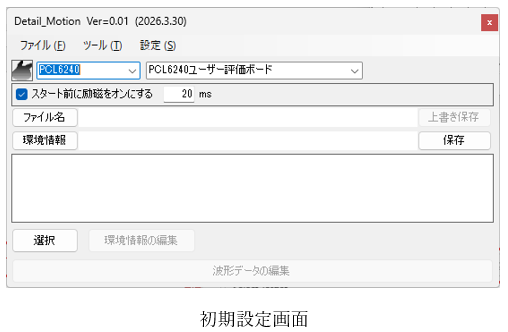
2. 環境情報と編集する軸を選択し、波形データの編集に移ります。
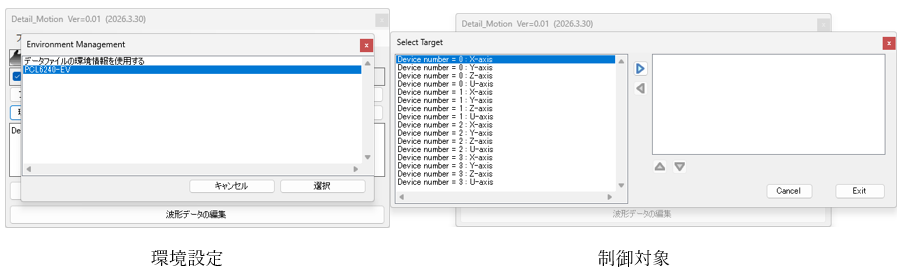
3. 各パラメータを設定し、波形データを作成します。
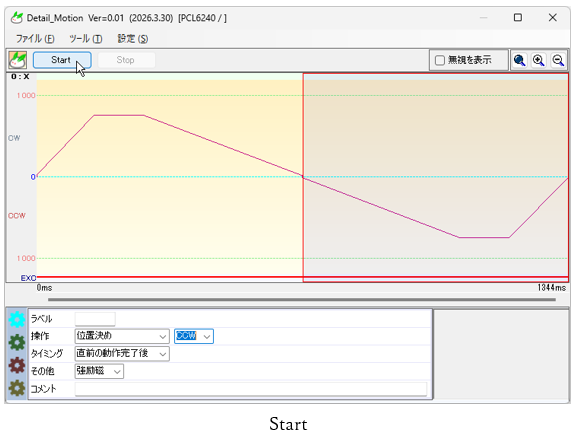
4. 制御基板と接続し、「Start」を押してステッピングモーターを動かします。
※使用方法の詳細は本ページにある「Detail Motionチュートリアル」の「4.1 初歩的な動作の作成例」または「4.2 やや複雑な動作の作成例」をご覧ください。
1. Detail Motionを起動し、LSI(PCL6240)を選択します。
2. 環境情報と編集する軸を選択し、波形データの編集に移ります。
3. 各パラメータを設定し、波形データを作成します。
4. 制御基板と接続し、「Start」を押してステッピングモーターを動かします。
※使用方法の詳細は本ページにある「Detail Motionチュートリアル」の「4.1 初歩的な動作の作成例」または「4.2 やや複雑な動作の作成例」をご覧ください。
PC以外からの制御
PC以外に、マイコンからもモーション制御が可能です。
今回は上記の動作パターンを「ESP32-WROOM-32E」から制御します。
1. Detail MotionからArduinoのサンプルファイルを出力します。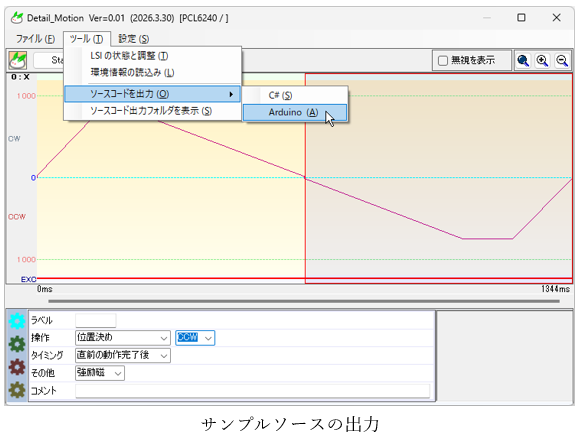
2. Arduino IDEを立ち上げ「ESP32-WROOM-32E」を選択します。
3. 手順1で出力したサンプルファイルをコンパイル、「ESP32-WROOM-32E」にプログラムを書き込みます。
4. 「ESP32-WROOM-32E」と制御基板を接続しプログラムを実行します。
この記事を参考に弊社ステッピングモーターも制御できますので、ぜひお試しください。
今回は上記の動作パターンを「ESP32-WROOM-32E」から制御します。
1. Detail MotionからArduinoのサンプルファイルを出力します。
2. Arduino IDEを立ち上げ「ESP32-WROOM-32E」を選択します。
3. 手順1で出力したサンプルファイルをコンパイル、「ESP32-WROOM-32E」にプログラムを書き込みます。
※ESPモジュールを使用する場合、Arduino IDEの拡張パッケージ「esp32」をダウンロードする必要があります。
この時、原稿作成時での最新バージョン3.3.7を使用するとSPIバスでの読み込み処理に失敗するため、ステータスの読み出し結果が0になり、2つ目の動作ブロックまでで停止し3つ目以降の動作ブロックから動作しないことが確認されています。
ここではバージョン2.0.5を使用しています。
この時、原稿作成時での最新バージョン3.3.7を使用するとSPIバスでの読み込み処理に失敗するため、ステータスの読み出し結果が0になり、2つ目の動作ブロックまでで停止し3つ目以降の動作ブロックから動作しないことが確認されています。
ここではバージョン2.0.5を使用しています。
4. 「ESP32-WROOM-32E」と制御基板を接続しプログラムを実行します。
この記事を参考に弊社ステッピングモーターも制御できますので、ぜひお試しください。