
EtherCAT対応 2相バイポーラ定電流、4軸ステッピングモータードライバー
 【特長】
【特長】
・Ethernet Fieldbus “EtherCAT” Interface
・Drive Profile CiA402、PPモード(Profile Position mode)、HMモード(Homing mode)に対応
DC同期:250 μs以上
・モーション制御コアにマブチモーターNPM製PCL6046を搭載
・2相バイポーラ定電流ステッピングモータードライバー
最大出力電流3.0 A/相、マイクロステップ1/32分割
・高度な電流制御機能
加減速時カレントアップ機能(設定電流の最大1.5倍(max. 3.0A))
AGC(Active Gain Control)機能
・エンコーダー入力による機械位置カウント
・ソフトウェアにより各種設定を行う (DIPスイッチレスにより信頼性を向上)
・小型コンパクト 170(W) × 120(D) × 30(H) mm
・優れたコストパフォーマンス
仕様
EtherCAT
| Device ID | 1個 |
|---|---|
| 通信プロトコル | EtherCAT PDO (Process Data Object) SDO (Service Data Object) |
| サポート通信プロトコル | CoE(CANopen application protocol over EtherCAT) FoE(File Access over EtherCAT) |
| 制御プロファイル | CiA402 ドライブプロファイル |
| 動作モード | PP(Profile position) Mode HM(Homing)Mode |
| 同期モード | DC(Distributed Clock)同期 250us以上 / FreeRun |
モーション制御
| 制御軸数 | 4軸 |
|---|---|
| モーション制御コア | NPM製パルスコントロールLSI PCL6046(基準クロック:24.576MHz ) |
ドライバー
| 適用モーター | 2相バイポーラステッピングモーター |
|---|---|
| 制御方式 | バイポーラ定電流駆動 |
| 励磁方式 | マイクロステップ制御 (1/1,1/2,1/4,1/8,1/16,1/32) |
| 出力電流 | 0.1A ~ 3.0A/相(0.1A単位) |
| モーター駆動電流制御 | AGC(Active Gain Control)制御※ 加減速時カレントアップ機能(設定電流の最大1.5倍(max. 3.0A) ) |
| 異常検出 | 過電流,過熱,モーター電源ダウン |
| ドライブパラメーター | SDO(Service Data Object)通信により設定 |
信号
| 入力信号 | 非常停止 /各軸:±エンドリミット / 原点 / エンコーダーA相、B相、Z相 |
|---|---|
| 出力信号 | アラーム / 各軸:コンパレーター |
その他
| 供給電圧 | DC +12 V ~ +24 V ±10% (制御電源 / モーター駆動電源、別入力) |
|---|---|
| 供給電流 | 制御電源:0.5A / モーター駆動電源:6A/2軸毎 |
| 適合規格 | RoHS指令 2011/65/EU (2015/863/EU追加4物質含む) |
| 使用温度範囲 | 0 ~ 45℃ (結露なきこと) |
| 保存温度範囲 | -10 ~ 60℃ (結露なきこと) |
| ファームウェアソフト | FoE(File Access over EtherCAT)プロトコルを利用して書き換え可 |
| 外形寸法 | 170mm(W)×120mm(D)×30mm(H) |
| 冷却方式 | 自然冷却 (放熱板が70℃を越える場合は強制冷却要) |
外形図
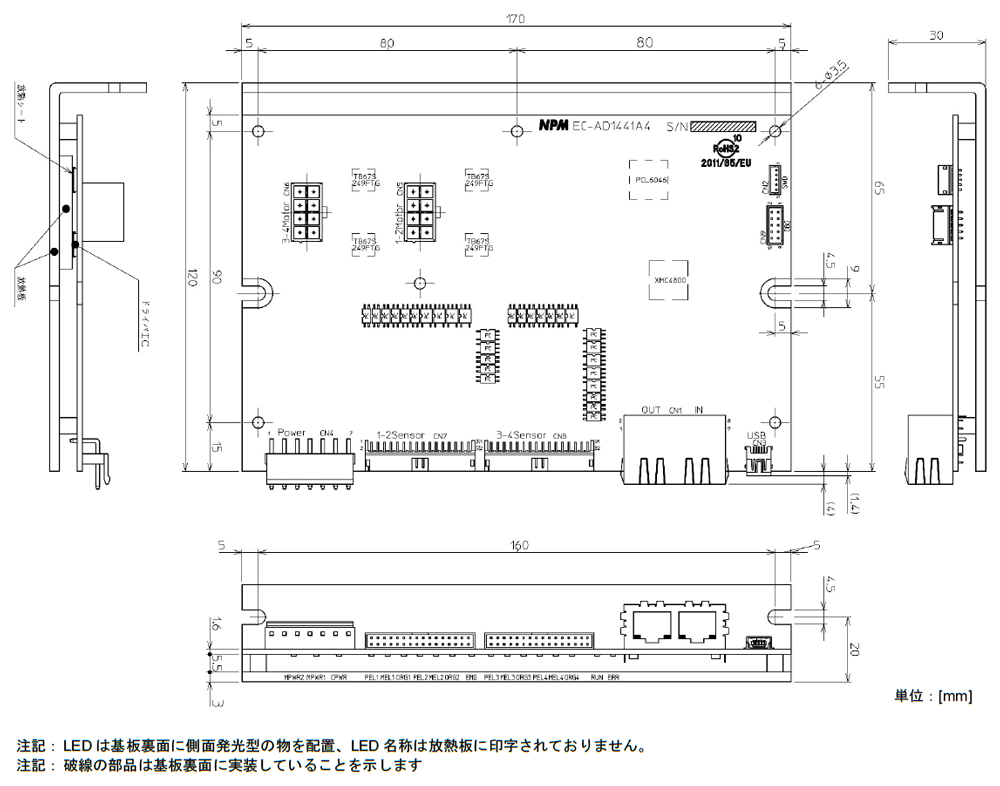
※クリックすると拡大します。
ブロック構成図
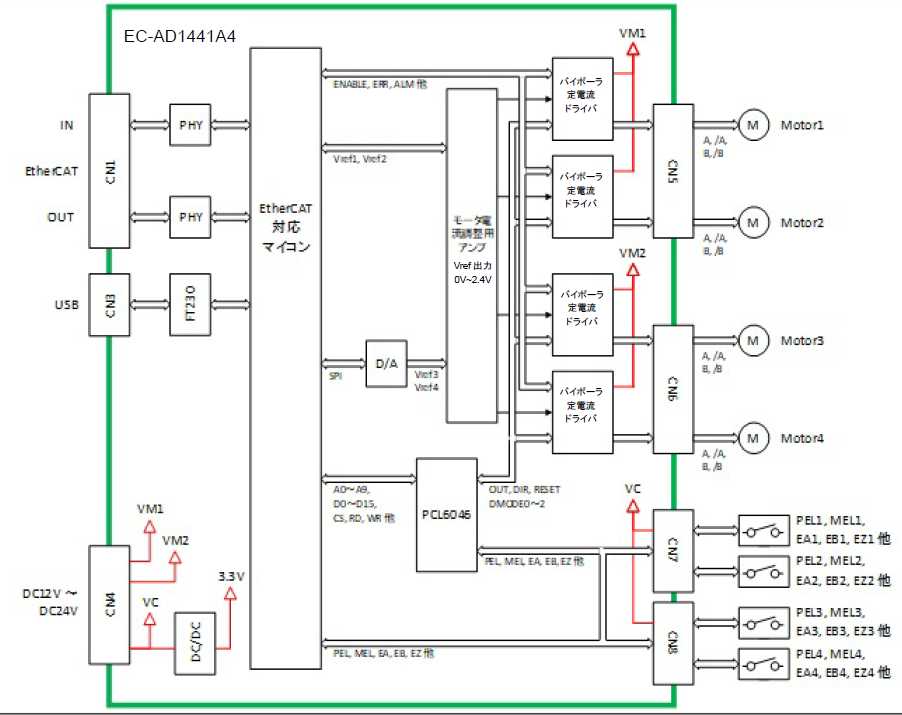
※クリックすると拡大します。
資料ダウンロード
英語版ダウンロード
参考資料
- OMRON NJ/NX
- CODESYS(windows)
- BECKHOFF TwinCAT
アクセサリー
| 品名 | 品番 | 型名 | 外観 |
| コネクターセット | 2240-001109 | ECB-B4CN |  |
| 電源供給用ハーネス | 2240-001106 | ECD-U4CA-PW1 |  |
| モーター接続用ハーネス | 2240-001110 | ECD-B4CA-MT1 |  |
| 入出力信号接続用ハーネス | 2240-001108 | ECD-U4CA-IO1 |  |