
今回は、ステッピングモータードライバ回路を設計する際の大まかな流れについて説明します。
ステッピングモータードライブ回路の設計フロー
| 設計スタート | |
| 1.モーター選定 | 装置が必要とする(トルク/推力、スピード、分解能)などからモーターを選定。 また、必要な機能やコストを考慮し(駆動方式、制御方式)を決定。 |
| 2.ドライブIC選定 | ・選定したモーターの電流 ・指令入力インターフェース ・駆動方式 ・励磁方式 などからモータードライブICを選定。 |
| 3.IC定数選定 | モーター電流値より(電流検出抵抗、基準電圧値)などの定数を算出。 励磁方式など、ICの付加機能を検討し回路を設計。 |
| 4.付加回路検討 | (指令入力フィルター、停止時発熱対策)などの付加回路を検討。 |
| 5.IC配置検討 | ドライブICのデータシートに則り、(放熱、周辺部品配置)を考慮して基板設計 |
| 6.妥当性確認 | 出来上がった基板の仕様動作、及び(基板/モーターの発熱、耐ノイズ性)などを確認。 |
| ゴール | |
1.モーター選定
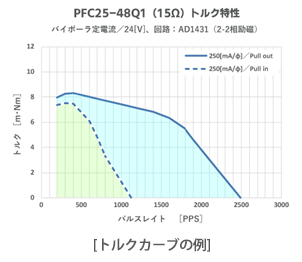 装置が必要とする、トルク及び動作スピードが、トルクカーブ内に入るモーターを選定します。※1
装置が必要とする、トルク及び動作スピードが、トルクカーブ内に入るモーターを選定します。※1
また、トルク特性は制御方式 (定電流/定電圧),駆動方式 (バイポーラ/ユニポーラ)により異なるため、必要な機能やコストを考慮しながら駆動方式,制御方式を決定します。※2
駆動方式,制御方式の特徴については、
「第1回.ステッピングモータードライブICの基礎」を御参照ください。
※1 推力はトルクに換算。トルクは安全率を考慮します。また、モーター選定が必要な際は弊社営業にお声掛けください。
※2 本シリーズはモータードライブICがテーマですので、ドライブICを使用するバイポーラ定電流または、ユニポーラ定電流ととして話を進めます。
2.ドライブIC選定
モーター出力電流
 選定したモーターの定格電流が流せるドライブICを選択します。
選定したモーターの定格電流が流せるドライブICを選択します。
ドライブICの最大電流は放熱面積の広い理想的な基板に実装した場合の値なので、実際に流せる電流 は60~70%程度と考えて選定します。
例えば最大電流3AのICの場合実際に流せる電流は2A程と考えるのが良いと思います。
ただし、基板面積を大きく取れる,効率的な放熱が行える,短時間定格で使用するなどの場合は、この限りではありません。
また、モーター電流に比べてドライブICの最大電流が極端に大きいのもお勧めしません。
例えば最大電流3AのICは1~2A付近を狙って設計しているため、モーター電流が0.2Aなどと少ない場合、ドライブICによっては誤差が大きくなり上手く制御できない可能性があります。
モーター電源電圧
 ドライブICのモーター電源電圧も余裕を持つ必要があります。
ドライブICのモーター電源電圧も余裕を持つ必要があります。
モーターや回路にもよりますが、外力によりモーターから発電された場合に電源電圧より高い電圧が印可される可能性があります。このため、少なくとも印可電圧の50%増し程度の電圧に耐えうるドライブICを選定するのが良いと思います。
また、モーター電源電圧は、モーターコイル抵抗×モーター電流×2以上である必要があります。
詳しくは、「第6回 定電流ドライブICで使用するモーターの選び方」を御参照ください。
駆動方式、励磁方式
モーター選定時に決めた駆動方式,励磁方式のICを選定します。
ステッピングモーター用のドライブICは通常、バイポーラ定電流用ICまたは、ユニポーラ定電流用ICのいずれかになります。
また、殆どのドライブICにはマイクロステップ制御機能(nW1-2相励磁)が付いています。
分解能を細かくしたい、振動を押さえたい、動作音を押さえたい、などの仕様要求がある場合は、マイクロステップ制御が効果的な場合があります。
マイクロステップについては「第3回 ドライブICの制御方式「励磁方式」」を御参照ください。
バイポーラ定電圧駆動を行いたい場合に、バイポーラ定電流用ICをバイポーラ定電圧用に使用できる場合があります。
ただし定電圧駆動時は、マイクロステップ機能は使用できなくなります。※3
※3 ドライブICの定電圧化使用の可否はドライブICメーカーにご確認ください。
指令入力インターフェース
システムのコントロールに合わせた、指令入力インターフェース (クロック/フェーズ/シリアル,他)を検討し、そのインターフェースを持つドライブICを選定します。※4
指令入力インターフェースについては「第2回 ドライブICに動作指令を与える信号の仕様」を御参照ください。
※4 クロックタイプの入力インターフェースの場合、弊社のクロック発生専用LSI(PCLシリーズ、PCDシリーズ)を使用すると、加減速制御など細かなクロック制御が比較的簡単に行えます。
その他の機能
各社のドライブICには、電流回生を効率的に行う機能,脱調を回避する機能,電流検出抵抗が不要なもの,など様々な付加機能を持つものがあります。
設計するシステムに必要な機能を検討の上、ドライブICを選定します。
ドライブICの評価ボードがある場合は、評価ボードでの動作確認を推奨します。
3.IC定数選定
電流検出抵抗
 モーター電流設定用の定数や、ICの付加機能の定数を選定します。
モーター電流設定用の定数や、ICの付加機能の定数を選定します。
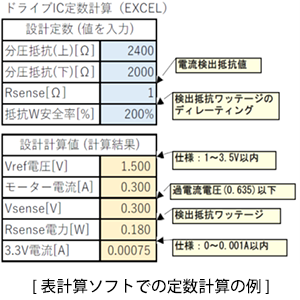
モーター電流値と、ドライブICの設定電流計算式から電流検出抵抗の値を選定します。
選定の際には、基準電圧の範囲や検出抵抗のワッテージも考慮する必要があります。
ドライブIC内部のばらつきにより、各相間の電流や基準電圧対出力電流には±5%程の誤差が発生する可能性があります。バラツキの拡大を抑えるため、抵抗の精度は±1%以下の物を推奨します。
また、最近のドライブICには検出抵抗レスの物もありますので、それを選択する手もあります。
電流検出抵抗の選択については「第5回 定電流ドライブICを使用する際の電流設定」を御参照ください。
なお、電流検出抵抗値と基準電圧値(抵抗分圧値)を決める際は、EXCELなどの表計算ソフトを使用することをお勧めします。
基準電圧値
 モーター電流は、ドライブICへ加える基準電圧値と電流検出抵抗の値から算出して設定します。※5
モーター電流は、ドライブICへ加える基準電圧値と電流検出抵抗の値から算出して設定します。※5
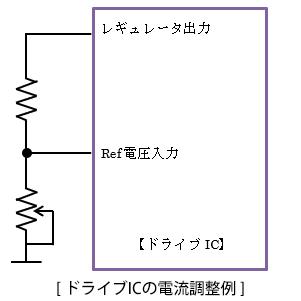
基準電圧は、電源電圧あるいはドライブICのレギュレータ出力電圧を抵抗で分圧して生成したり、マイコンのDA出力電圧などを利用したりします。
基準電圧を変えることによりモーター電流を変更することができますので、システムでのモーター電流値が固まっていない場合は、基準電圧用の分圧抵抗をボリュームにしておくことで、モーター電流が調整可能になります。モーター電流が決まった後にボリュームの値の固定抵抗値を選定する方法もあります。
基準電圧の設定については「第5回 定電流ドライブICを使用する際の電流設定」を御参照ください。
※5 ドライブICによっては基準電圧が固定で、検出抵抗のみでモーター電流を設定する物もあります。
励磁方式
励磁方式には、2-2相励磁,1-2相励磁,マイクロステップ(nW1-2相励磁)などがあり、多くのドライブICが励磁方式を選択できます。
マイクロステップは位置分解能を上げたい,動作音を小さくしたい,スムースに回したい,などの場合に有効です。
ただし、入力する指令クロックは×分解能分の速度とパルス数が必要になります。
また、PFタイプモーターは構造的に1/8程の位置分解能までしか上げられません。それ以上の分解能設定ではぎくしゃくした動きになります。
動作音、スムースの対策では1/8以上でも効果があります。
励磁方式については「第3回 ドライブICの制御方式「励磁方式」」を御参照ください。
Decay設定
定電流ドライブではコイルに貯まったエネルギーを効率的に回生して利用するDecay制御を行います。
マイクロステップ時の電流追従性を改善したりする場合に、Decay制御を設定します。
Decay制御については「第4回 Decay (ディケイ) コントロール」を御参照ください。
チョッピング周波数
ドライブICには電流制御サイクルの周波数を設定できる物があります。
電流の脈流を減らしたり、モーターから発する音質を変えたりしたい場合に調整します。
ただしモーターにもばらつきがあり、モーターによって音が目立つもの,目立たないものがありますので、調整した音質ですべてのモーターがカバーできない場合もあります。
ドライブIC出力信号
ドライブICには初期励磁状態の時に出力する電気角モニタ信号や、素子の過発熱や過電流時に出力するエラー信号などを持つものがあります。
必要な場合はこれらの信号をコントローラに接続します。
その他
ドライブICによっては脱調抑制機能など特殊な機能を持ったものもあります。
ドライブICの評価ボードがある場合は、評価ボードでの機能確認を推奨します。
4.付加回路検討
ドライブICの機能以外にシステムに必要な機能を付加します。指令入力フィルター
クロック入力がケーブル配線される場合、信号ラインにノイズが乗ってくる可能性があります。
この様な場合はCRフィルターなどで、ノイズをフィルタリングすることにより、耐ノイズ性を向上します。
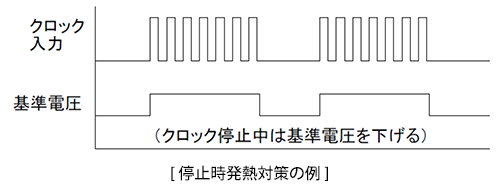
停止時発熱対策
ステッピングモーターは常に電流を流すため、停止時もモーターとドライバーは発熱します。
停止中にトルクを下げて良い場合は、電流値を制御する基準電圧値を下げたり、励磁をOFFしたりするなどの制御を行い、モーターとドライバーの発熱を抑えます
制御タイミングはコントローラからの指令や、パルス入力のタイミングなどで行います。※6
※6 電流値変更はモーターの振動が収まってから行うのが良いです(例えば50msec)。
5.IC配置検討
ドライブIC のデータシートやアプリケーションノートに則り、各部品を配置します。
放熱
ドライブICの放熱は基板へ放熱するものが多くなっており、放熱しきれない場合は放熱シートを介して放熱フィンで放熱します。放熱フィンを取り付ける場合は周辺部品との干渉を考慮の上で基板を設計します。また、基板はサーマルビアなどにより基板全体に効率よく放熱できるようにします。
ドライブICの発熱は、出力段FETのON抵抗とモーター電流によるI2×Rの消費電力の割合が大きく、電流が2倍になると発熱は約4倍になります。発熱によりドライブIC内部のジャンクション温度が保証値を超えないようにする必要があります。ドライブICにもよりますがジャンクション温度120℃以下での使用が必要です。
発熱については「第7回 モーターとドライバーの発熱」を御参照ください。
周辺部品配置
ドライブICの周辺部品で特に電流検出抵抗と、電源用コンデンサはIC近傍に配置するようにします。
電流検出抵抗の配線は[短く][太く]を基本に配置を検討します。電流検出抵抗の配線を引き回すとモーター電流のリプルが大きくなったりします。
また、電源用コンデンサは平滑用コンデンサとノイズ抑制用セラミックコンデンサを取り付けます。
ノイズ抑制用セラミックコンデンサをIC近傍に取り付けることによりノイズ抑制効果が得られます。
平滑用コンデンサはデータシートの推奨範囲の電解コンデンサを出来るだけIC近傍に取り付けます。
リプル電流が大きい場合はハイブリッドコンデンサなどの使用も効果的です。
6.妥当性確認
出来上がった基板の仕様動作及び信頼性試験により製品妥当性を確認します。
基板/モーターの発熱
実際の発熱を測定し、仕様を満足するか確認します。
発熱が大きい場合は、放熱の見直し、仕様の見直しなどを行います。効果的な対策は電流を下げるが一番と思われます。
耐ノイズ性試験
電源ラインおよび信号ラインにノイズを重畳させ、位置ずれなどの誤動作が起きないことを確認します。
ノイズ対策としてはクロック入力ラインのフィルター定数の見直し、信号ラインケーブルのツイスト処理やフェライトコアの挿入など様々なものがあります。
その他
仕様動作確認、ノイズ試験以外に、温度試験、振動試験、衝撃試験、電圧変動試験、加速試験などの信頼性試験を必要に応じて行います。
以上の様な流れでステッピングモータードライバの回路を設計します。