
半導体各社のステッピングモーターICには様々な物があります。ドライブICを選定するにあたり、
ユニポーラ/バイポーラ駆動やドライブ電流値などの基本仕様以外にもキーになる仕様があります。
今回はそのステッピングモータードライブICに動作指令を与える信号の仕様を説明します。
ユニポーラ/バイポーラ駆動やドライブ電流値などの基本仕様以外にもキーになる仕様があります。
今回はそのステッピングモータードライブICに動作指令を与える信号の仕様を説明します。
指令入力インターフェース
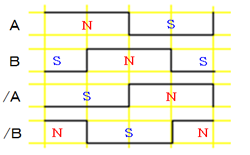
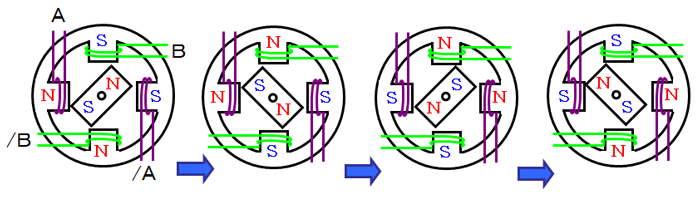
モーターを動かすには、モーターコイル各相(フェーズ)の励磁シーケンスを切り替え、モーターを駆動します。
各相のモーターコイル電流を決まったシーケンスで切り替えることにより、
励磁(N/S極性)を切り替え、モーターが回転する。
(図は、2-2相励磁の例)
各相のモーターコイル電流を決まったシーケンスで切り替えることにより、
励磁(N/S極性)を切り替え、モーターが回転する。
(図は、2-2相励磁の例)
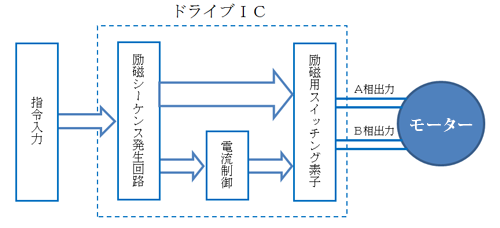
ドライブICに、この励磁シーケンスを切り替えるための指令を入力しモーターを制御します。
指令入力の代表的なタイプ
a.クロック(パルス)入力タイプ
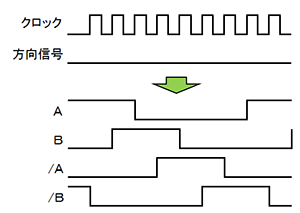
クロックと方向信号の2種類の信号によりモーターをコントロールします。ドライブICは、クロックと方向信号を内部回路で各相の励磁シーケンスに変換し、モータを駆動します。
クロックの変化タイミングで励磁シーケンスが切替わり、クロックの速度でモーターのスピードを、クロックの数でモーターの回転量、方向信号のハイ/ローでモーターの回転方向を制御します。
マイクロステップ対応のドライブICでマイクロステップを行う場合も、励磁シーケンスを気にせずにクロックと方向信号だけでマイクロステップが行えます。
クロックの変化タイミングで励磁シーケンスが切替わり、クロックの速度でモーターのスピードを、クロックの数でモーターの回転量、方向信号のハイ/ローでモーターの回転方向を制御します。
マイクロステップ対応のドライブICでマイクロステップを行う場合も、励磁シーケンスを気にせずにクロックと方向信号だけでマイクロステップが行えます。
| 長所 | クロックと方向信号の2信号でのコントロールのためソフト制御が簡単。 |
|---|---|
| 短所 | クロックラインを、基板間を電線でまたぐ様な長い引き回しにした場合、ノイズによる誤動作の可能性がある。 ドライバーなどでは信号入力部にフィルターを入れる場合がある。 |
b.フェーズ入力タイプ
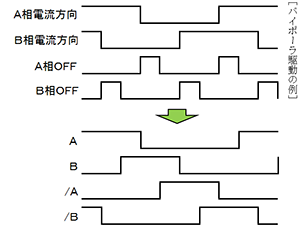 モーターコイル各相(フェーズ)の電流方向、ON/OFF、及び電流割合などの励磁状態を制御するレベル信号により、必要な励磁シーケンスを発生させ、モーターをコントロールします。
モーターコイル各相(フェーズ)の電流方向、ON/OFF、及び電流割合などの励磁状態を制御するレベル信号により、必要な励磁シーケンスを発生させ、モーターをコントロールします。
モーターのスピード,回転量,回転方向は、励磁シーケンスの切り替え順序とその切り替え速度で制御します。
マイクロステップ対応のドライブICでマイクロステップを行う場合は、下図の信号以外に電流割合を制御する数本の信号が必要になります。
| 長所 | 励磁シーケンスの状態信号をレベルで与えるため、ノイズが載っても誤動作しにくい。 |
|---|---|
| 短所 | モーターの励磁方式により指令信号本数が増える(2-2相:2本,1-2相:4本,W1-2相:6本)。 また、コントロールソフト側で励磁シーケンスを生成する必要がある。 |
c.シリアル入力タイプ
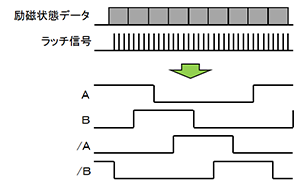 フェーズ入力と同様の励磁シーケンス等の励磁状態データを、2,3本のシリアル通信信号でドライブICに入力し、モーターをコントロールします。
フェーズ入力と同様の励磁シーケンス等の励磁状態データを、2,3本のシリアル通信信号でドライブICに入力し、モーターをコントロールします。
モーターのスピード,回転量,回転方向は、励磁シーケンスの切り替え順序とその切り替え速度で制御します。
マイクロステップ対応のドライブICでマイクロステップを行う場合、励磁シーケンス以外に電流割合のデータも通信で入力します。
| 長所 | シリアル通信で繰り返し励磁シーケンスを書き込むため、ノイズが載っても誤動作しにくく、 引き回しが長くても誤動作しにくい。また、指令信号は2,3本程度と少ない。 |
|---|---|
| 短所 | コントロールソフトは励磁シーケンスとシリアル通信を生成する必要があり、複雑になる。 また、簡易通信のためあまり高速では動作させられない場合がある。 |
※この他にドライブIC内にコントロール機能を内蔵し、直接動作指令を入力するものもあります。
※クロック入力信号はCPU等で生成しますが、細かなクロック周波数設定やスムースな速度変化をさせたい場合はCPUでは難しい場合があります。
弊社ではこれらの細かな設定が行える、クロック発生専用LSI、【PCLシリーズ】,【PCDシリーズ】を販売しております。
【PCDシリーズ】はフェーズ入力用の励磁シーケンス(2-2相,1-2相)を発生させることもできます。
※クロック入力信号はCPU等で生成しますが、細かなクロック周波数設定やスムースな速度変化をさせたい場合はCPUでは難しい場合があります。
弊社ではこれらの細かな設定が行える、クロック発生専用LSI、【PCLシリーズ】,【PCDシリーズ】を販売しております。
【PCDシリーズ】はフェーズ入力用の励磁シーケンス(2-2相,1-2相)を発生させることもできます。
お問い合せ
製品について詳しく聞いてみたい。等どんな事でもお問い合せください。弊社担当よりご連絡差し上げます。