
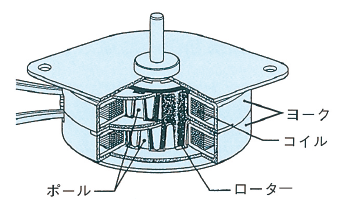
 モーターのコイルに電流を流し、ポールを電磁石化することを、励磁と言います。
モーターのコイルに電流を流し、ポールを電磁石化することを、励磁と言います。
モーターコイルはA相コイル/B相コイルの2つがあり※1、それぞれに正極と逆極となるポールが2つあります。
これら4つのポールが電気角で90度ずつずれた位置に配置されています。
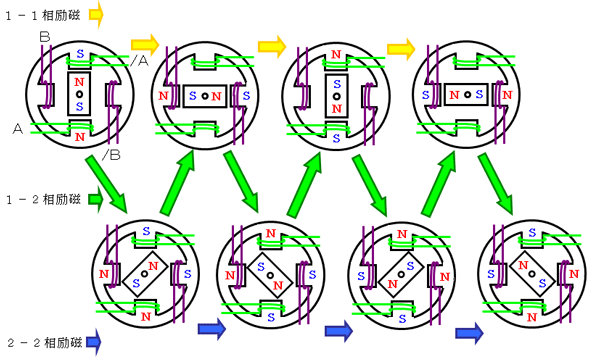
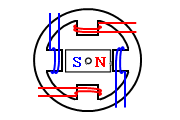 ステッピングモーターは、この4つ1組のポールが複数組並んでいる構造となっており、4つのポール1組分を図示すると右図の様になります。この内部のローターマグネットをどの様に励磁し回転させるかが励磁方式になります。
ステッピングモーターは、この4つ1組のポールが複数組並んでいる構造となっており、4つのポール1組分を図示すると右図の様になります。この内部のローターマグネットをどの様に励磁し回転させるかが励磁方式になります。
右図でマグネットが90度動く動作が、1ステップ分の基本ステップで、 4ステップで電気角360度分動きます。
実際のモーターは4ステップ×組数 分のステップで1回転となります。
例えば当社のPF25-48モーターには4つ1組のポールが12組あり、48が基本ステップ数になります。
モーター1回転の分割数は励磁方式によって決まり、
方式として「2-2相励磁・1-2相励磁」や「マイクロステップ」があります。
※1 コイル端子は、A相コイル 正極のA相,逆極の/A相、B相コイル 正極のB相,逆極の/B相があります。
またA相コイルのA,/A相のことを1相,3相、B相コイルのB,/B相のことを2相,4相と呼ぶ場合もあります。
2-2相励磁・1-2相励磁
・2-2相励磁
・1-1相励磁※2
・1-2相励磁があります。
1-1相励磁・2-2相励磁は、4ステップで、電気角360度分回転します。
1-2相励磁は、1-1相励磁と2-2相励磁を交互に行うことにより分解能が2倍になり、基本ステップ数の2倍で一回転します。
例えば48が基本ステップのモーターを1-2相励磁で動作させた場合は96ステップで一回転します。
モーターの振動を減らしたい場合などに1-2相励磁は使用されます。
※2 1-1相励磁は2-2相励磁に比べトルクとダンピング特性が劣るため、基本ステップで動かす場合は2-2相励磁が多く使われ、1-1相励磁はあまり使われません。
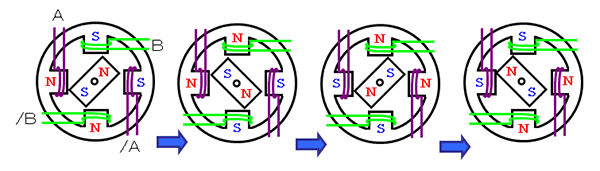
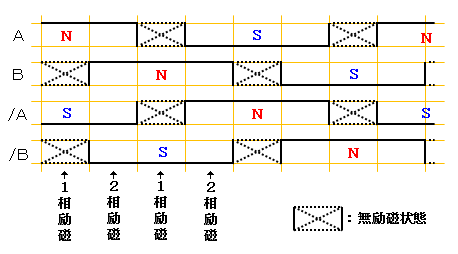
2-2相励磁での電気角360度回転
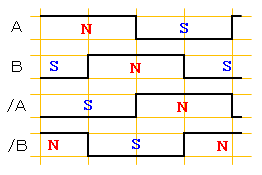 各相のモーターコイル電流を決まったシーケンスで切り替えることにより、
各相のモーターコイル電流を決まったシーケンスで切り替えることにより、
励磁(N/S極性)が切り替わり、モーターが回転します。
1-2相励磁での電気角360度回転
 1-1相励磁と2-2相励磁を交互に行うことで、
1-1相励磁と2-2相励磁を交互に行うことで、
分解能が2倍の1-2相励磁になります。
マイクロステップ
マイクロステップの励磁方式にはW1-2相励磁,2W1-2相励磁,4W1-2相励磁などがあり、
・W1-2相励磁は基本ステップ数の4倍で一回転
・2W1-2相励磁は基本ステップ数の8倍で一回転
・4W1-2相励磁は基本ステップ数の16倍で一回転します。
例えば基本ステップ数が48のモーターの場合、
・W1-2相励磁では192ステップで一回転
・2W1-2相励磁では384ステップで一回転
・4W1-2相励磁では768ステップで一回転します。※3
※3 マイクロステップは電流割合を変化させ、基本ステップ角度の間でバランスを取って止めているため、モーターの構造によっては停止位置の精度が出ない場合があります。当社PFモーターの場合、振動や音の低減が必要な場合にマイクロステップは有効です。
2相励磁の場合
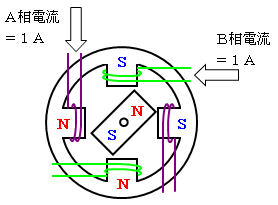 2相励磁の場合、A相とB相に流す電流の値は同じ。
2相励磁の場合、A相とB相に流す電流の値は同じ。
マイクロステップの場合
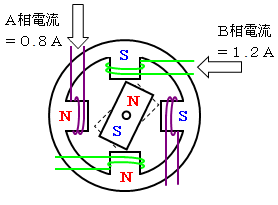 A相に流す電流を少なく、B相に流す電流を多くすると、B相コイルに引かれる力が強くなり、途中の位置で停止する。
A相に流す電流を少なく、B相に流す電流を多くすると、B相コイルに引かれる力が強くなり、途中の位置で停止する。
基本的な所を押さえればドライブICを使うことによりステッピングモーターは簡単に動かせます。
ただし、実際の回路基板を設計する際には仕様の理解以外に、設定電流と発熱,GNDや電流検出抵抗回りの引き回しなどにも注意が必要です。
半導体各社ではドライブICの評価ボードやテクニカルドキュメントなどを用意している場合も多く、これらを利用するのが効果的と考えます。