
EtherCAT ステートマシン(EtherCAT State Machine; ESM)
EtherCAT ステートマシンはSubデバイスの通信状態を管理するSubデバイスアプリケーションソフトウェアの機能です。
MainデバイスからのリクエストによりSubデバイスのステートマシンが応答します。
より詳しく知りたい方は、ETG.1000 - パート6 をご覧ください。
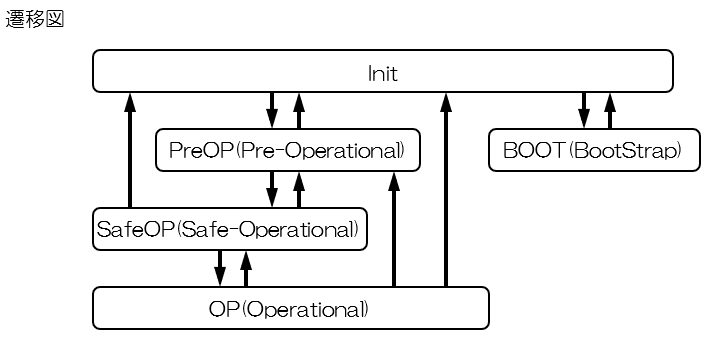
Init
Subデバイスが電源ONしてから最初の通信状態です。アプリケーション層の通信はできません。
Mainデバイスはレジスター操作により、Subデバイスに対してノードアドレス設定等が可能です。
PreOP
アプリケーション層へのメールボックス通信(非周期的通信)が可能ですが、プロセスデータ通信(周期的通信)はできせん。
この通信状態では主に周期的に行わないドライバーのパラメータ設定等を行います。
なお、弊社のEC-ADシリーズでは、この状態のみパラメータの保存機能(1010h:Store pameters)と出荷時の初期値に戻す(1011h:Resotre Default Parameters)機能が有効になります。
SafeOP
プロセスデータ中、入力プロセスデータ(TxPDO:状態データ)のみ通信が可能です。
出力プロセスデータ(RxPDO:指令データ)は通信できませんので安全状態(Safe state)を保持していると言えるでしょう。
OP
プロセスデータ中、入力プロセスデータ(TxPDO)と出力プロセスデータ(RxPDO)両方が有効になり、
Mainデバイスも出力プロセスデータ(RxPDO)を利用してSubデバイスを制御できます。
BOOT
この状態では一般的にFoEプロトコルを使用し、ファームウェアのアップデートを行います。
弊社のEC-ADシリーズでも対応しておりますので、必要な場合に利用してください。
CiA402ステートマシン(Finite States Automaton; FSA)
CiA402ステートマシンは主にPDS(power drive system)におけるデバイスの電源をコントロールする機能です。Subデバイスは、ネットワーク経由で送信された「コントロールワード(RxPDO)」により、PDSの状態遷移を行います。状態はSubデバイスで生成された「ステータスワード(TxPDO)」によって、現在の状態を返します。
より詳しく知りたい方は、ETG.6010やIEC61800-7-201の「Controlling the power drive system」をご覧ください。
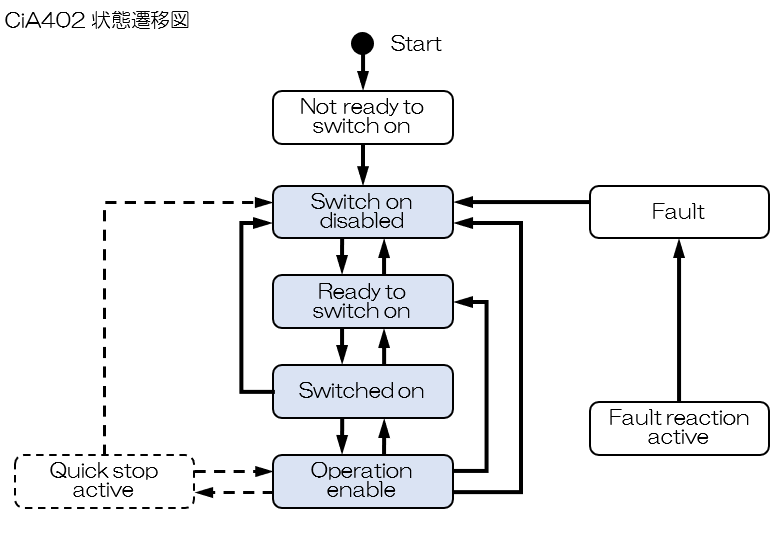
Switch on disabled
Subデバイスは制御電源が確立され、初期化後、自動的にこの状態に入ります。
Ready to switch on
Mainデバイスから「Shutdown」コマンドを受信し、[Switch on disabled]からこの状態に遷移されます。
弊社のEC-ADシリーズではステートの遷移だけになります。
Switched on
Mainデバイスから「Switch ON」コマンドを受信し、[Ready to switch on]からこの状態に遷移されます。
弊社のEC-ADシリーズではモーター電源がONされるが、励磁OFFの状態です。
Operation enabled
Mainデバイスから「Enable Operation」コマンドを受信し、[Switched on]からこの状態に遷移されます。
弊社のEC-ADシリーズでは励磁ONされ、ターゲットやセットポイントによって動作可能です。
EC-ADシリーズ
ステッピングモータドライバ搭載の弊社EC-ADシリーズは、実績のある弊社製パルスコントロールLSI PCLシリーズを搭載。
PPモードをDC同期, 短いサイクル時間(250us)で利用でき、補間やCSP制御を必要としないEtherCAT多軸制御アプリケーションにおすすめの製品です。
PULSERVO II
 PULSERVO II
PULSERVO II