
1. PDO通信とMailbox通信
EtherCATには周期通信であるPDO(Process Data Objects)通信と非同期通信であるMailbox通信があります。
Mailbox通信のプロトコルは
CAN application layer over EtherCAT (CoE)、Ethernet over EtherCAT (EoE)、File access over EtherCAT (FoE)、
Servo drive profile over EtherCAT (SoE)、Vendor-specific over EtherCAT (VoE)があります。
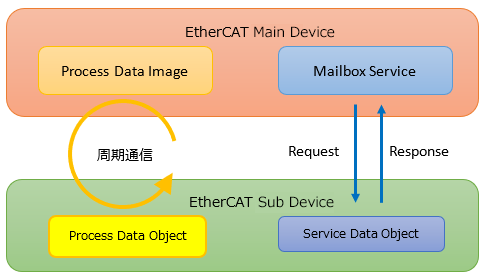
2. PDO通信
通常、クリティカルに同期したいオブジェクトはPDOに割付けられ、PDO通信によりMainデバイスSubデバイス間で周期通信されます。
周期はMainデバイスとSubデバイスの仕様に依ります。
弊社EC-ADシリーズのPDO最小周期は250μsです。
またPDO(CoEプロトコル)の割付けは下表のようになっています。
EC-AD1442A1の場合
| 受信(Rx)PDO マッピング | 送信(TX)PDO マッピング |
|---|---|
| Control Word | Status Word |
| Target Position | Position Actual Value |
| Profile Velocity | Error Code |
| Profile Acceleration | Modes Of Operation Display |
| Profile Deceleration | |
| Compare Data | |
| Modes Of Operation |
EC-ADシリーズのオブジェクトはCompare Dataを除きCiA402のドライブプロファイルに基づいており、Profile Position mode(PP)やHoming Mode(HM)の制御を規格通りに制御できます。
Compare Dataはコンパレーター機能(弊社製品独自機能)に使用されます。コンパレーター機能はCompare Dataと比較カウンターと比較する機能です。
比較カウンターには指令位置、機械位置、偏差、現在速度を選択できます。
比較結果は出力端子より出力され、通信を介さず、他のデバイスと同期ができます。
3. Mailbox通信
一方、Mailbox通信の内、CoE通信は任意のタイミングでSubデバイス内の各オブジェクトへアクセスできます。
従来、各メーカー固有のユーティリティソフトや外部スイッチで設定をしていたドライバーの設定などが、MainデバイスからのCoE通信により設定できます。
また、Subデバイスの仕様にも依りますが、CoE通信により詳細なドライバーの情報(詳細なアラーム情報・履歴、電流値、温度、稼働時間など)も取得ができるようになります。
弊社EC-ADシリーズはCoEとFoEに対応し、CoE通信により、マイクロステップ分割数、出力電流値、カレントダウン遅延時間、加速時の出力電流、モーター停止時の出力電流などの設定と設定内容の確認ができます。
また、FoE通信によりファームウェアのアップデートが可能です。
EC-ADシリーズ
ステッピングモータドライバ搭載の弊社EC-ADシリーズは、実績のある弊社製パルスコントロールLSI PCLシリーズを搭載。
PPモードをDC同期, 短いサイクル時間(250us)で利用でき、補間やCSP制御を必要としないEtherCAT多軸制御アプリケーションにおすすめの製品です。
PULSERVO II
 PULSERVO II
PULSERVO II