
1. CiA402対応
EtherCATデバイスはCiA402(IEC 61800-7-201 および IEC 61800-7-301 に定められているドライブおよびモーションコントロールのデバイスプロファイル)に対応する必要があります。
すべてのオブジェクトは0000hからFFFFhの領域に配置され、グループ分けがされています。
(1) 0000h ~ 0FFFh データ型式領域
(2) 1000h ~ 1FFFh CoE通信領域(CoE:CAN application protocol over EtherCAT)
(3) 2000h ~ 5FFFh メーカー固有領域
(4) 6000h ~ 9FFFh プロファイル領域
(5) AFFFh ~ FFFFh Reserved
(2)のCoE通信領域では、主にデバイスの情報取得や通信に必要な定義を行い、
(3)のメーカー固有領域では、メーカー定義のMotion制御の環境設定を行ったり、ステータスを取得したりします。
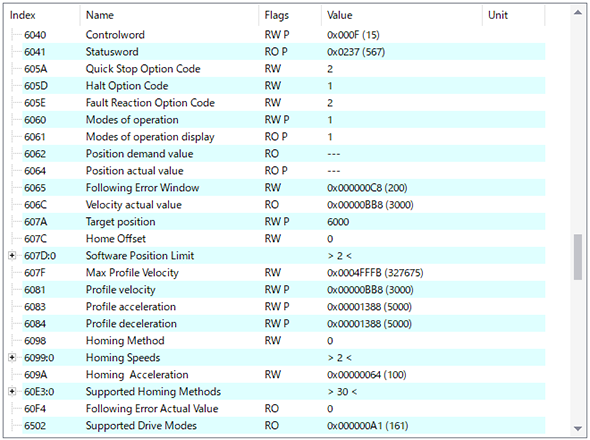
(4)のプロファイル領域では、実際に動作させるコマンドや情報などを読み書きします。プロファイル領域の主な物として以下のようなものがあります。
X軸を例:
6040h 「Controlword」:Subデバイスの動作起動、停止等をコントロールします。
6041h 「Statusword」:Subデバイスのステータスを取得します。
6060h 「Mode of Operation」:動作モードを設定します。
6064h 「Position actual value」:現在位置を取得します。
607Ah 「Target Position」:目標位置を設定します。
6081h 「Profile velocity」:移動速度を設定します。
このようなオブジェクトが多数用意してあります。(下図参照)
2. リアルタイム通信方式
Mainデバイスから出発するEtherCATフレームは1サイクルでネットワーク上すべてのSubデバイスを接続順に通過し、通過中はオンザフライ処理でEtherCATフレームを更新するため、サイクル毎にすべてのSubデバイスの周期データが更新されます。
また、ETherCATは全二重通信方式を採用しているため、送受信が同時に行われます。
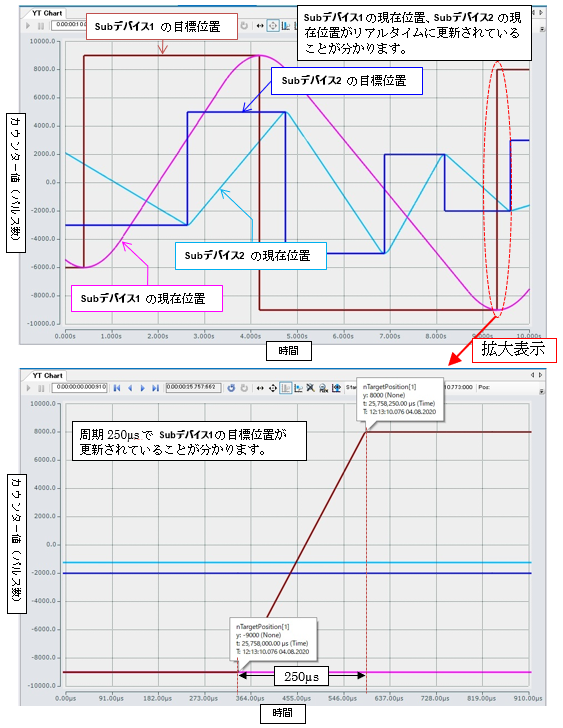
下の図は、IPC(TwinCAT)-EC-AD1442A1(Subデバイス1)-EC-AD1241A4(Subデバイス2)の構成で、動作モードProfile Position modeで動作させた時の目標位置と現在位置をグラフ表示させた図です。
Mainデバイスにとっては、目標位置が送信で現在位置が受信になりますが、どちらもリアルタイムに更新されていることが分かります。
また、目標位置の更新部分を拡大表示させたグラフでは、目標位置が周期(250µs)で更新されていることが分かります。
3. コンフォーマンステスト
コンフォーマンステストは、EtherCAT製品のプロトコルの仕様適合性を確認するためのテストのことです。
EtherCAT製品は他社のMainデバイス、他社のSubデバイスなど、複数のメーカーが販売している製品と接続することもあり、販売開始前にプロトコルの仕様適合性を確認することが必須となっています。
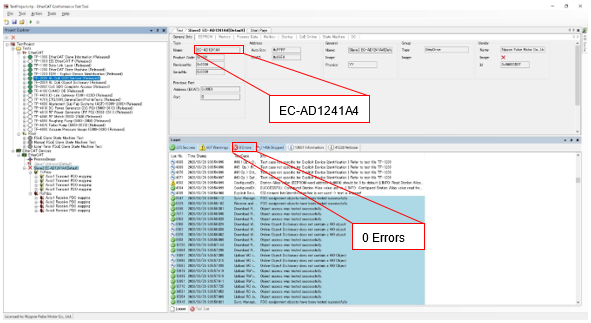
その適合性を確認するために、コンフォーマンステストツールを使用したテストを行い、エラー件数が0件になるようにしなければなりません。
弊社のEC-AD1241A4もコンフォーマンステストツールを使用してテストを実施し、下図のようにエラー件数が0件となり適合性が確認されました。
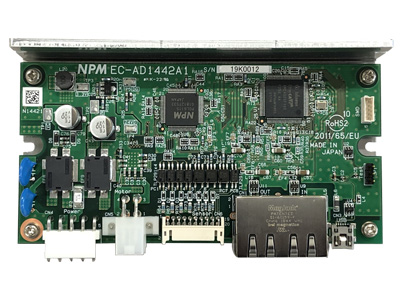
EC-ADシリーズ
PULSERVO II
 PULSERVO II
PULSERVO II