
CiA402の速度・位置決めのモーション制御では、一般にCSPモードあるいはPPモードが使用されます。
ステッピングモーターの特徴からどのモードが最適かを考えてみます。
ステッピングモーターの特徴からどのモードが最適かを考えてみます。
1. CSPモード・DC同期での速度変動
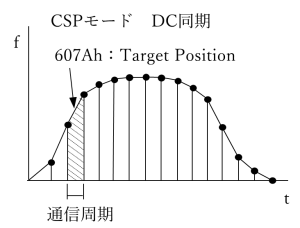
Main デバイスとSub デバイスは通信周期を合わせて使用します。
その周期内にMain デバイスは、位置データをSubデバイスに送信し、Subデバイスは受信した位置へモーターを動作させます。
ここではステッピングモーターをパルスで制御するときに、通信周期でパルス出力する周波数について考えてみます。
その周期内にMain デバイスは、位置データをSubデバイスに送信し、Subデバイスは受信した位置へモーターを動作させます。
ここではステッピングモーターをパルスで制御するときに、通信周期でパルス出力する周波数について考えてみます。
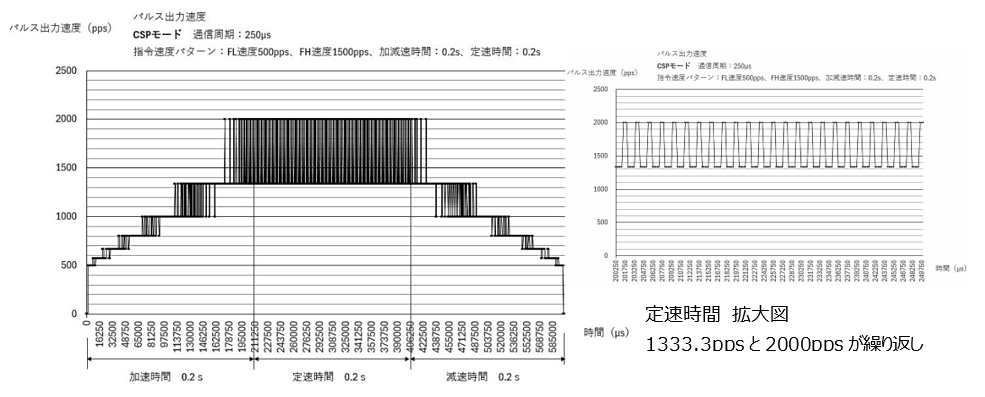
例、ステッピングモーターを通信周期:250µs 、一定速度1500ppsで動作させる場合
計算では1/1500=666.67µsごとに1pulse出力することになりますが、通信周期が250µsなので、この間隔でしかパルス出力することができず、1500ppsの一定出力でなく下表のパルス出力速度1333.3pps、1333.3pps、2000pps・・・のようにパルス出力することになります。
加減速時でも同様に速度変動が起こり、次の速度パターンで動作させようとすると
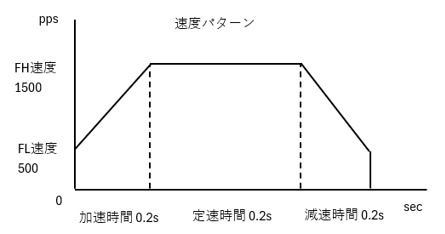
次のように周波数が変動することとなります
ここで1000pps一定速度で動作させようとした場合を考えてみます。
1/1000=1000µsごとに1pulse出力することになり、周波数変動のない一定間隔でのパルス出力になりますが、加減速動作の場合は上記のように速度変動します。
CSPモード・DC同期でのパルス出力周波数は、指令する速度や通信周期によって異なる速度変動になります。
計算では1/1500=666.67µsごとに1pulse出力することになりますが、通信周期が250µsなので、この間隔でしかパルス出力することができず、1500ppsの一定出力でなく下表のパルス出力速度1333.3pps、1333.3pps、2000pps・・・のようにパルス出力することになります。
| 出力pulse | 計算時間(µs) | pulse出力時間(µs) | pulse出力間隔(µs) | pulse出力速度(pps) |
| 1 | 666.67 | 750 | 750 | 1333.3 |
| 2 | 1333.33 | 1500 | 750 | 1333.3 |
| 3 | 2000.00 | 2000 | 500 | 2000.0 |
| 4 | 2666.67 | 2750 | 750 | 1333.3 |
| 5 | 3333.33 | 3500 | 750 | 1333.3 |
| 6 | 4000.00 | 4000 | 500 | 2000.0 |
| ・ ・ |
・ ・ |
・ ・ |
・ ・ |
・ ・ |
次のように周波数が変動することとなります
ここで1000pps一定速度で動作させようとした場合を考えてみます。
1/1000=1000µsごとに1pulse出力することになり、周波数変動のない一定間隔でのパルス出力になりますが、加減速動作の場合は上記のように速度変動します。
CSPモード・DC同期でのパルス出力周波数は、指令する速度や通信周期によって異なる速度変動になります。
2. PPモードでの速度変動

EC-ADシリーズには、パルスコントロールLSI(NPM製)PCL61x5が搭載されており、この専用LSIに移動量、速度データを与えることによりモーター制御用のパルスを出力してくれます。
このPCL61x5のパルス出力精度は、供給する水晶発振器の周波数に応じており、20MHzの水晶発振器の場合、1/20MHz=0.05µs です。
このPPモードでパルス出力させた場合の出力周波数を考えてみます。
このPCL61x5のパルス出力精度は、供給する水晶発振器の周波数に応じており、20MHzの水晶発振器の場合、1/20MHz=0.05µs です。
このPPモードでパルス出力させた場合の出力周波数を考えてみます。
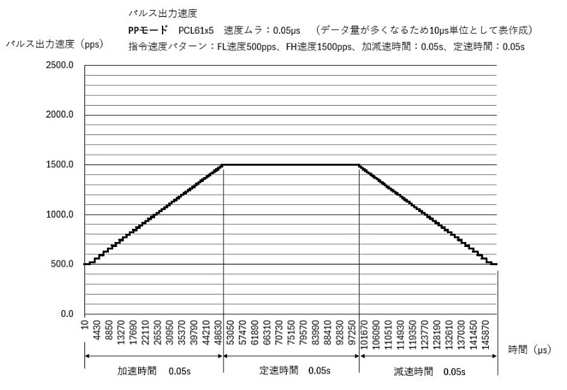
例、1500pps一定速度で動作させた場合
計算では1/1500=666.67µsごとに1pulse出力することになりますが、パルス出力精度が0.05µsなので、下表のパルス出力速度1499.93pps、1500.04pps、1500.04pps・・・のようにパルス出力することになります。
1項と同様な速度パターンで動作させた場合、出力周波数は次のようになります。
計算では1/1500=666.67µsごとに1pulse出力することになりますが、パルス出力精度が0.05µsなので、下表のパルス出力速度1499.93pps、1500.04pps、1500.04pps・・・のようにパルス出力することになります。
| 出力pulse | 計算時間(µs) | pulse出力時間(μs) | pulse出力間隔(µs) | pulse出力速度(pps) |
| 1 | 666.67 | 666.70 | 666.70 | 1499.93 |
| 2 | 1333.33 | 1333.35 | 666.65 | 1500.04 |
| 3 | 2000.00 | 2000.00 | 666.65 | 1500.04 |
| 4 | 2666.67 | 2666.70 | 666.70 | 1499.93 |
| 5 | 3333.33 | 3333.35 | 666.65 | 1500.04 |
| 6 | 4000.00 | 4000.00 | 666.65 | 1500.04 |
| ・ ・ |
・ ・ |
・ ・ |
・ ・ |
・ ・ |
1項と同様な速度パターンで動作させた場合、出力周波数は次のようになります。
3. CSPモード・DC同期とEC-ADシリーズのPPモードの速度変動の比較
上記の例ではCSPモード・DC同期時間を250µsとして計算しました。
これをEC-ADシリーズのPPモード、PCL61x5のパルス出力精度0.05µsと比較し、5000倍もの差があり各段に速度変動が少ないことが解ります。
この速度変動に対し、特にステッピングモーターでは、その特徴から速度変動への対応が苦手なモーターですので、大きな振動や動作音が発生、あるいは脱調や乱調に至ることもあり動作に影響を与えます。
これらのことからを制御する最適なモードは、CSPモード・DC同期よりも
速度変動の少ないEC-ADシリーズのPPモード、PCL61x5で制御する方が最適であると言えます。
また、速度変動を目立たなくするには、1ステップの分解能を上げるマイクロステップの機能が有効です。
CSPモード・DC同期で通信周期を合わせながら多軸を制御することによって自由なモーター制御が得られますが速度変動があることを考慮する必要があります。
多軸同期を必要としない場合は、PPモードを使用する方が速度変動が少なく滑らかな動作を得ることができると言えます。
これをEC-ADシリーズのPPモード、PCL61x5のパルス出力精度0.05µsと比較し、5000倍もの差があり各段に速度変動が少ないことが解ります。
この速度変動に対し、特にステッピングモーターでは、その特徴から速度変動への対応が苦手なモーターですので、大きな振動や動作音が発生、あるいは脱調や乱調に至ることもあり動作に影響を与えます。
これらのことからを制御する最適なモードは、CSPモード・DC同期よりも
速度変動の少ないEC-ADシリーズのPPモード、PCL61x5で制御する方が最適であると言えます。
また、速度変動を目立たなくするには、1ステップの分解能を上げるマイクロステップの機能が有効です。
CSPモード・DC同期で通信周期を合わせながら多軸を制御することによって自由なモーター制御が得られますが速度変動があることを考慮する必要があります。
多軸同期を必要としない場合は、PPモードを使用する方が速度変動が少なく滑らかな動作を得ることができると言えます。
EC-ADシリーズ
ステッピングモータドライバ搭載の弊社EC-ADシリーズは、実績のある弊社製パルスコントロールLSI PCLシリーズを搭載。
PPモードをDC同期, 短いサイクル時間(250us)で利用でき、補間やCSP制御を必要としないEtherCAT多軸制御アプリケーションにおすすめの製品です。
PULSERVO II
エンコーダー付ステッピングモーターと専用ドライバーのセット製品。ステッピングモーターの特長を生かし、オープンループ制御の弱点であった“脱調”を無くしたステッピングモーターシステムです。CSP・PP・HMモードに対応し、DC同期250μs以上、分解能4,000~20,000P/R、ブレーキ付減速機付き等をラインアップしております。
 PULSERVO II
PULSERVO II
PULSERVO IIお問い合せ
製品について詳しく聞いてみたい。等どんな事でもお問い合せください。弊社担当よりご連絡差し上げます。