
1. PCL61x5の直線補間
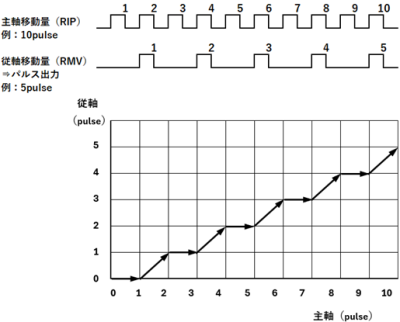
直線補間は、各軸にある「主軸」と「従軸」で行われ、主軸の移動量に対し従軸の移動量の割合でパルスを出力する方法で行われます。このとき「従軸」のみパルス出力します。
次は、主軸移動量(RIP)10pulseに対し従軸移動量(RMV)5pulseを出力する例です。従軸移動量の5pulseが図の間隔で出力します。
次は、主軸移動量(RIP)10pulseに対し従軸移動量(RMV)5pulseを出力する例です。従軸移動量の5pulseが図の間隔で出力します。
2. 通信周期の設定
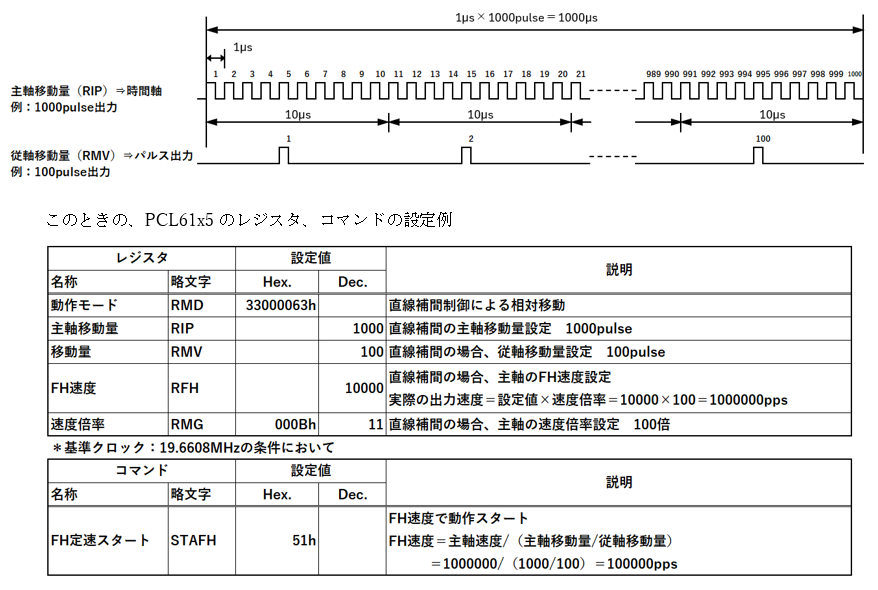
主軸の周波数から1pulseの出力時間を計算しパルス数をかけることによって、主軸の移動量を時間軸とみなすことができます。
次は、主軸が周波数1000000pps(1パルスの時間幅:1/1000000=1μs)で移動量1000pulseの例です。
主軸が1000pulseを移動するには、1μs×1000pulse=1000μsの時間がかかることになり、従軸移動量を100pulseとすると、1000μsの時間に一定間隔で100pulse出力します。
CSPモードでは通信周期毎に目標位置が送られてくるので、主軸移動量の設定により通信周期と動作時間サイクルと一致させ、目標位置と現在位置の差分を従軸移動量に設定し補間動作を指令することでこのモードに対応することができます。
CSPモードはDC割込に同期してSub Deviceが動作する仕組みで、基本的にDC割込処理でPCL61x5のスタートコマンドを書込み、毎サイクルの動作を起動します。
ただし、後述のプリレジスタを使うなどで通信周期と主軸の動作時間サイクルを連続的に一致させるには工夫が必要となります。
次は、主軸が周波数1000000pps(1パルスの時間幅:1/1000000=1μs)で移動量1000pulseの例です。
主軸が1000pulseを移動するには、1μs×1000pulse=1000μsの時間がかかることになり、従軸移動量を100pulseとすると、1000μsの時間に一定間隔で100pulse出力します。
CSPモードでは通信周期毎に目標位置が送られてくるので、主軸移動量の設定により通信周期と動作時間サイクルと一致させ、目標位置と現在位置の差分を従軸移動量に設定し補間動作を指令することでこのモードに対応することができます。
CSPモードはDC割込に同期してSub Deviceが動作する仕組みで、基本的にDC割込処理でPCL61x5のスタートコマンドを書込み、毎サイクルの動作を起動します。
ただし、後述のプリレジスタを使うなどで通信周期と主軸の動作時間サイクルを連続的に一致させるには工夫が必要となります。
3. 目標位置指令の動作例
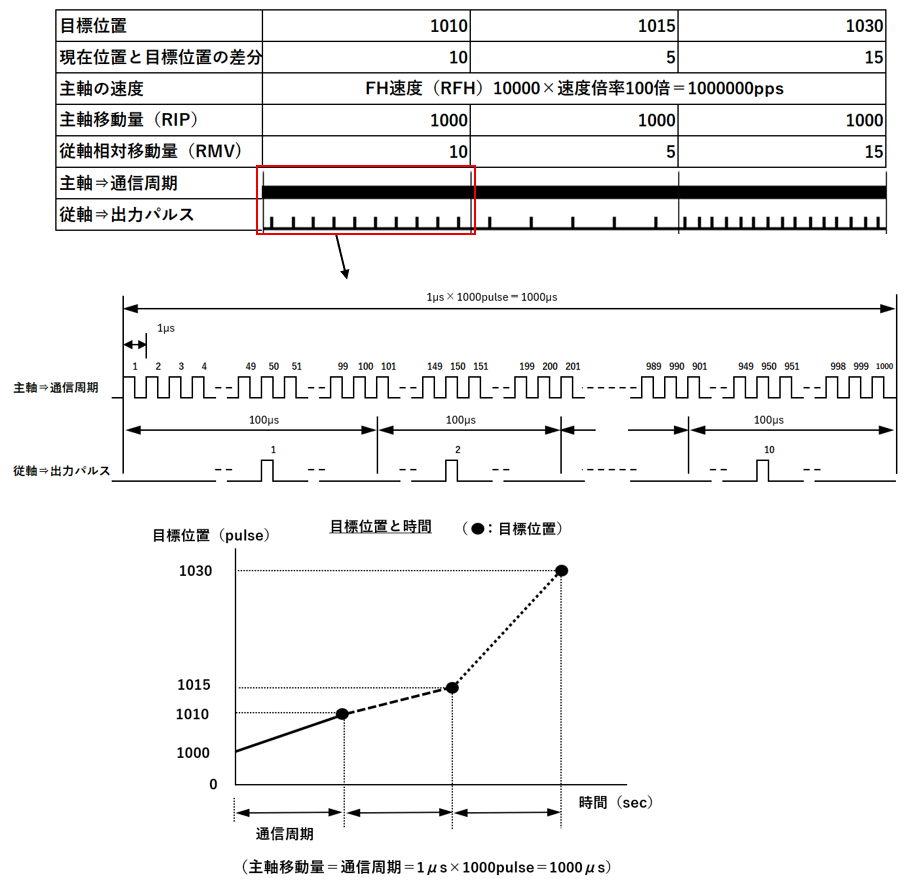
Main Deviceからの目標位置指令に対して動作させる例です。
この例では、主軸の速度1000000ppsで主軸移動量(RIP)1000pulseを設定し1μs×1000pulse=1000μsを動作サイクル時間とし、これを通信周期と一致させ、従軸の移動量を(RMV)に目標位置と現在位置の差分を設定することで1000μs毎に目標位置、1010、1015、1030へと動作させます。
この例では、主軸の速度1000000ppsで主軸移動量(RIP)1000pulseを設定し1μs×1000pulse=1000μsを動作サイクル時間とし、これを通信周期と一致させ、従軸の移動量を(RMV)に目標位置と現在位置の差分を設定することで1000μs毎に目標位置、1010、1015、1030へと動作させます。
4. 連続動作への例
CSPモード、DC同期モードでは、通信周期でMain Deviceから送られてくる目標位置を連続的に動作させます。
この連続的に動作させる手法の一例としてPCL61x5のプリレジタ機能を紹介します。
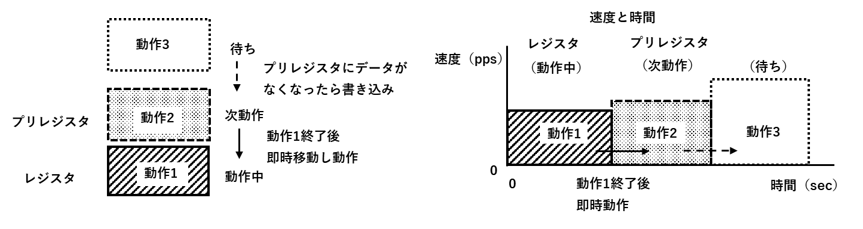
PCL61x5には、動作中のレジスタと後段に位置するプリレジスタとがあり、プリレジスタに次動作(移動量とスタートコマンド)を書き込んでおくと動作終了と同時に停止時間無しでプリレジタの値がレジスタに書き込まれ次動作が始まります。
次は、連続動作のイメージです。
動作1が動作中に、プリレジスタに動作2を書き込んでおくと動作1が終了後、停止することなく動作2が開始されます。
プリレジスタにデータがなくなったことを確認した後、動作3をプリレジスタへ書き込みます。
このように設定を順次繰り返すことで各動作間を停止させることなく連続動作ができます。
プリレジスタの連続動作機能を使用する場合は、DC同期モードの通信周期に動作時間サイクルを一致させる工夫が必要となります。
この連続的に動作させる手法の一例としてPCL61x5のプリレジタ機能を紹介します。
PCL61x5には、動作中のレジスタと後段に位置するプリレジスタとがあり、プリレジスタに次動作(移動量とスタートコマンド)を書き込んでおくと動作終了と同時に停止時間無しでプリレジタの値がレジスタに書き込まれ次動作が始まります。
次は、連続動作のイメージです。
動作1が動作中に、プリレジスタに動作2を書き込んでおくと動作1が終了後、停止することなく動作2が開始されます。
プリレジスタにデータがなくなったことを確認した後、動作3をプリレジスタへ書き込みます。
このように設定を順次繰り返すことで各動作間を停止させることなく連続動作ができます。
プリレジスタの連続動作機能を使用する場合は、DC同期モードの通信周期に動作時間サイクルを一致させる工夫が必要となります。
EC-ADシリーズ
ステッピングモータドライバ搭載の弊社EC-ADシリーズは、実績のある弊社製パルスコントロールLSI PCLシリーズを搭載。
PPモードをDC同期, 短いサイクル時間(250us)で利用でき、補間やCSP制御を必要としないEtherCAT多軸制御アプリケーションにおすすめの製品です。
PULSERVO II
エンコーダー付ステッピングモーターと専用ドライバーのセット製品。ステッピングモーターの特長を生かし、オープンループ制御の弱点であった“脱調”を無くしたステッピングモーターシステムです。CSP・PP・HMモードに対応し、DC同期250μs以上、分解能4,000~20,000P/R、ブレーキ付減速機付き等をラインアップしております。
 PULSERVO II
PULSERVO II
PULSERVO IIお問い合せ
製品について詳しく聞いてみたい。等どんな事でもお問い合せください。弊社担当よりご連絡差し上げます。